

2013.08.03
Beaglebone Black+3軸加速度センサーで傾き検出に成功
部品を散らかすとツマに刺されそう。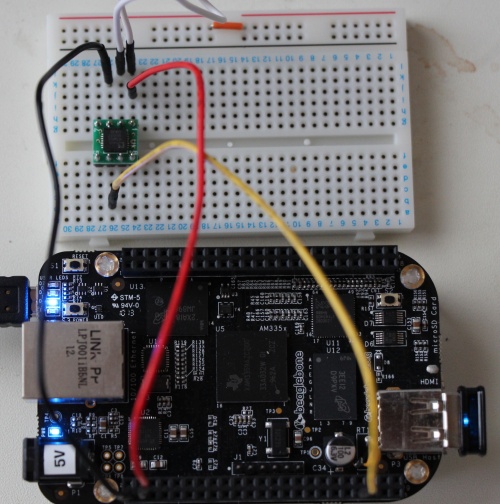
前回成功したアナログ入力の応用。
使用したのは秋月電子のKXM52-1050という3軸加速度センサー
接続するのは4カ所
(1)センサーのVddにボードから3.3V入力(VDD3.3V)
(2)GNDをボードのGNDとつなぐ
(3)PSDをVddとつなぐ(動作開始)
(4)X軸出力をボードのAIN0につなぐ
ボードを平置きした状態(0G)ではオフセット値付近の1750mV付近の値を返す。
4の端子を下に1の端子を上にボードを垂直にすると1310mV付近の値を示す。説明書によると
1G=660mVと書いてあるのでこんなもんか。逆に4の端子を上に、1の端子を下にボードを垂直にすると1799mVを示す。アナログ入力の最大値は1800mVなので上限を越えてしまったようだ。何か工夫しないとダメっぽい。
工夫
(実験1):X軸出力→240Ω→AIN0→240Ω→GNDってしてみたら
15mV(-1G)〜20mV(0G)〜26mV(1G)になった。なぜ????検出される電圧が半分になると思ったのに????
(実験2):X軸出力→240Ω→AIN0→480Ω→GNDってしてみたら
32mV(-1G)〜43mV(0G)〜55mV(1G)になった。少し改善した
(実験3):X軸出力→240Ω→AIN0→1000Ω→GNDってしてみたら
65mV(-1G)〜88mV(0G)〜110mV(1G)になった。さらに改善ww
(実験4):この状態でセンサーへの供給電源をVDD3.3VからSYS5Vに変更。なぜかVDD5Vだとうまくいかない
77mV(-1G)〜111mV(0G)〜145mV(1G)になった。
(実験5):X軸出力→80Ω→AIN0→1000Ω→GNDってしてみたけどまったく変わらない。なんでー
何か大きな勘違いをしている気がする・・・・
※説明書にはオフセット値誤差±167mV、測定誤差±5%と書いてある。強い衝撃与えるとオフセット値がずれたり、もどらなくなったりすると書いてある。中はメカニカルな機構になっているのかな?
※傾けてから電圧が変わるまでに1秒弱かかる気がする。こんなレスポンスでクアッドローターとか作れるのか?
※ちなみに写真にUSB-Wifiドングルささっているけど、うまく動作しない・・・・
Category:#電子工作 Raspberry Pi、Arduinoなど
■ ■ ■ コメント ■ ■ ■
いいっすね!
001 [08.03 17:08]Aガット@OCN:加速度センサのデータシートを見ると、Output Resistance 32KΩとなっていますので、X軸出力→AIN0→32KΩ→GNDで半分ぐらいに分圧されませんかね?データシートのNote5に負荷抵抗は3.2M以上にオフセット値がずれるとも書いてますね。ホントは1段オペアンプをかますと良いんですか。 ↑
002 [08.03 17:09]Aガット@OCN:すみません、入力ミスです「負荷抵抗は3.2M以上にオフセット値がずれる」→「負荷抵抗は3.2MΩ以上にしないとオフセット値がずれる」 ↑
003 [08.03 17:41]Aガット@OCN:ちなみに負荷抵抗っていのうは、出力ピンにつながるGNDまでの抵抗値です。32KΩで分圧すると32K X 2 = 64KΩですね。ただ、抵抗値が大きくなるとCPU側のA/D変換が問題が起きるかもしれないのでダメかもしれません。 ↑
004 [08.03 18:30]yori@UQ:実験1?実験3:分圧で入力してるって事を書いてるんだと思うけど、抵抗値が低すぎ。そのオーダーの抵抗値だと、センサからの電流が相当強くないと、GNDに逃げちゃうよ。分圧抵抗の値は、R1+R2=10K?50KΩくらいが目安。逆に抵抗値を高くしすぎると、値の読み取りが不安定になる。R1を2つの抵抗に分けて、その抵抗の間に0.1μFくらいのコンデンサをGNDに対して接続してT型LPFを組むと安定する。あとはカット&トライ。 ↑
005 [08.03 18:37]yori@UQ:あと、最近の加速度センサは、だいたいMEMSという技術で作られてます。MEMSとは、半導体製作技術を使って機械構造を作るっていうモノです。という事で中身はメカ機構と同等なので、強い衝撃を与えると壊れます。 ↑
006 [08.03 21:09]練太郎★1@InfoWeb:こういう事をやっているうちにオシロスコープが欲しくなって来るのだよ。最近のはやたら安いからなあ。ボードは御子息にしゃぶられぬ様注意 ↑
007 [08.03 21:40]ふぇちゅいん(バルス!) TW★47:なるほどー、ありがとうございます。なんとなく理解しました。説明書の裏に英語で色々と書いてありますね。 ↑
008 [08.04 01:36]ほわ@Biglobe:3軸加速度センサはゲームボーイのコロコロカービィのカセットをジャンクで買ってきて、中のセンサーだけ拝借すると安上がりっ♪ ↑
本カテゴリーで直近コメントが書かれた記事
→カテゴリー:#電子工作 Raspberry Pi、Arduinoなど(記事数:225)
本カテゴリーの最近の記事(コメント数)


