
2013.06.14
BeagleBone:コマンドラインから外部LEDの制御に成功
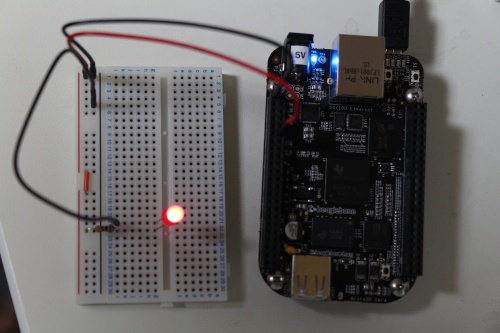
出来た♪とりあえずデジタル出力に成功。これ面白いわ~。あとデジタル入力とアナログ入力・出力のやり方を覚えてセンサーチップからの情報の引き出し方を覚えれば簡単に自律ロボットもどき作って遊べそう。もちろん使い慣れているPerlで組むよw
コネクタマップを見て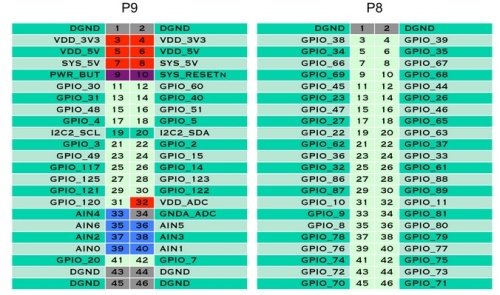
たとえばGPIO port 60(左のコネクタの右側上から6番目)に通電するためには、まず
- echo 60 > /sys/class/gpio/export
active_low direction edge power subsystem uevent value
というファイルがある。
まず、GPIO60を出力で使う事を宣言するために
- echo out > direction
- echo 1 >value
消すには
- echo 0 >value
- cat value
↓のサイトではまずコネクタの使い方としてMODE7を選んでいるが、現在所持しているBeagleboneには/sys/kernel/debug/omap_mux/gpmc_ad6なんてディレクトリは無かった。写真を見ると昔のBeagleboneなので仕様変更があったのかも。
- beaglebone で、コマンドラインからデジタルとアナログ入出力 - お前の血は何色だ!! 4 23 users 2いいね
テスターで測ると流れる電圧は3.3V。LEDに1.8V、抵抗に1.1Vぐらいだった。電子工作久しぶりすぎてLEDのプラスとマイナスも分からない。あぶねー。オームの法則とか計算方法とか思い出さなきゃ。最近は昔と違って便利な回路シミュレーターとかがある気がする。フリーで無いかな。
追記
後から調べたところによるとGPIO出力はMAX4~6mAに抑える必要あり、もっと抵抗値をあげないとボードが壊れる。短時間なら大丈夫だろうけど。
試して無いけど使用が終わったポートは
echo 60 > /sys/class/gpio/unexport
とするそうだ。
参考:OpenCVで遊ぼう!: BeagleBone BlackでLEDを光らせる
Category:#電子工作 Raspberry Pi、Arduinoなど
Follow @fetuin
■ ■ ■ コメント ■ ■ ■
いいっすね!
001 [06.14 04:22]。@InfoWeb:こういう記事見ると買いたくなるけど、センサーからの電圧変化で出力を変えて動作させるロジックとか難しそうだ…。 ↑
002 [06.14 04:44]mn@Dion:流れるのは電流で、電圧は印加するものです~_~; ↑
003 [06.14 09:20]フリーなら@YourNet:LTSpiceドソー ↑
004 [06.14 23:01]Aガット@OCN:100Ωだと10mA以上流れてるけど、ポートの駆動能力は大丈夫ですかね? ↑
005 [06.15 00:42]ふぇちゅいん(管理人) TW★47:>>004 ぎゃ、学習しました。テスターで測ったら8.9mA。調べるとoutputのmax currentは4mAだそうです。ダメっすね。 ↑
本カテゴリーで直近コメントが書かれた記事
12/12 00:58:「M5Stamp Fly」をドローン初心者が自宅で飛ばしてファームウェア更新から宙返り、UnitCam付けたりとか301320分前
11/29 08:19:おうち秋月電子かよ!自宅の積み電子キットがすごい量に・・・221日前
11/27 09:16:「Raspberry Pi Pico 2 W」は7ドル(1000円)でBluetoothもWifiも使える223日前
07/01 21:34:Arduinoで航空無線が聴ける。Arduino Nanoで制御するエアバンド受信シールド「SCARP」が9500円。2024年10月出荷開始372日前
12/06 16:22:赤外線カットフィルター無しのラズパイ公式カメラv2にフィルター追加580日前
11/03 10:39:オープンソースの家庭用地震計「EQIS-1」(PRIORIS)の完成品が8580円で登場613日前
09/29 11:31:Raspberry Pi 5が発表。4から2倍高速化、M2ストレージおよびPCI-Express2.0対応。外付けでGPUがつなげちゃう?1万円~648日前
08/28 00:48:Raspberry pi zero 2Wが本当に3500円で来た!zeroとの比較681日前
08/22 09:42:Raspberry zero 2Wが送料込み3500円686日前
06/24 23:21:今月の「トランジスタ技術」はラズパイカメラ特集。凄いこの雑誌セミプロの寄稿を集めた同人誌だ745日前
05/06 22:29:Raspberry PiでCPU温度を測定する方法794日前
04/24 23:54:何日間持つか実験。ラズパイzeroにUSBカメラとモバイルバッテリーをつないでリアルタイム配信806日前
04/08 09:45:『これが届く頃、俺の畑は既に死んでいるだろう』ラズベリーを地植えして超絶後悔した人の手記822日前
→カテゴリー:#電子工作 Raspberry Pi、Arduinoなど(記事数:240)
本カテゴリーの最近の記事(コメント数)
2025.04.21Raspberry PiとLiDARセンサーで360度3Dパノラマスキャナーを自作するオープンソースプロジェクト「PiLiDAR」1コメ
2025.03.05ラズパイ公式!ポメラ的な文章作成用ハンドヘルドPC「Micro Journal Rev.2 ReVamp」。Zero 2W搭載4コメ
2025.02.27理系フリマ8が3月1日開催4コメ
2024.12.10「M5Stamp Fly」をドローン初心者が自宅で飛ばしてファームウェア更新から宙返り、UnitCam付けたりとか32コメ
2024.12.05SeeedのRaspberry Pi zero用Grove Base(HAT)がベストフィットで良い感じ11コメ
2024.12.04Raspberry Piのカメラで静止画を撮る時のオプションメモ:fswebcam/USBカメラ時とraspistill/公式カメラ9コメ
2024.11.28おうち秋月電子かよ!自宅の積み電子キットがすごい量に・・・30コメ
2024.11.26「Raspberry Pi Pico 2 W」は7ドル(1000円)でBluetoothもWifiも使える72コメ
2024.11.17Raspberry Piベースの立体視カメラを作るためのオープンソースボード「StereoPi」19コメ
2024.11.03Raspberry Piとディスプレイでお手軽デジタルサイネージを作れるオープンソースソフト「Anthias」5コメ
| 鬯ョ�ォ�ス�エ髯晢ソス�ス�「�ス縺、ツ鬯ッ�ョ�ス�エ髯キ�ソ�ス�ー�ス�ス�ス�サ�ス�ス�ス�」�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ッ隴趣ス「�ス�ス�ス�カ�ス�ス�ス�ス�ス�ス�ス�ク鬯ッ�ッ�ス�ィ�ス�ス�ス�セ�ス�ス�ス�ス�ス�ス�ス�」鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬯ョ�エ鬩幢ソス�ス�イ�ス�サ�ス�ス�ス�ス�ス�ス�ス�ス umomo鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス2鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ョ�エ陞滂スァ�ス�、�ス�イ�ス�ス�ス�ス�ス�ス�ス�ケ鬯ョ�ッ�ス�キ�ス�ス�ス�サ�ス�ス�ス�ス�ス�ス�ス�ス鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬯ョ�エ鬩幢ソス�ス�イ�ス�サ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス79鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ蟷「�ス�「髫エ荳サ�ス隶捺サ�@�ス�コ鬯ゥ�「隰ウ�セ�ス�ス�ス�ケ髫エ雜」�ス�「�ス�ス�ス�ス�ス�ス�ス�。鬯ゥ蟷「�ス�「髫エ雜」�ス�「�ス�ス�ス�ス�ス�ス�ス�シ鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス17鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つJP鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス26鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つorz鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス38鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ蟷「�ス�「髫エ雜」�ソ�ス�ス�コ�ス�「鬩搾スオ�ス�コ�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス346鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ョ�」髮具スサ�ス�ソ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ャ鬯ゥ蟷「�ス�「髫エ雜」�ソ�ス�ス�コ�ス�「�ス�ス髮懶ス」�ス�ス�ス�ヲ3B(鬯ョ�ォ�ス�イ�ス�ス�ス�「鬮」蛹�スス�ウ髫カ轣假ス・�ス�ス�ソ�ス�ス鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ァ鬯ゥ蟷「�ス�「�ス�ス�ス�ァ鬩幢ス「�ス�ァ�ス�ス�ス�ス髫ィ蜊債鬯ゥ蟷「�ス�「髫エ雜」�ス�「�ス�ス�ス�ソ�ス�ス�ス�ス鬩搾スオ�ス�コ�ス�ス�ス�ス)鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス40鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つDcd鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス85鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス45鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ774(鬯ゥ蛹�スス�カ鬮ョ讎奇ソス�ス�ス�ス�サ髯キ�サ髮懶ス」�ス�ス�ス�ソ�ス�ス�ス�ス鬯ッ�ョ�ス�ォ髫イ�、隲幢スカ�ス�ソ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�イ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ィ)鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス83鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ッ�ッ�ス�ゥ髮倶シ�スヲ�エ�ス�ア隰夲スオ�ス�ソ�ス�ス驛「�ァ闔ィ螟イ�ス�ス�ス�ク�ス�ス�ス�コ鬯ョ�」闔ィ�ス�ス�ッ闔ィ螟イ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス41鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス鬩包スカ闔ィ竏ャ�ア�ェ�ス�ス�ス�ケ�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス(em鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ァ鬯ゥ蟷「�ス�「髫エ蜿厄スィ雋サ�ス�コ郢ァ莨夲スス�ク�ス�コ鬯ゥ�「隰ウ�セ�ス�ス�ス�ケ�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�オ鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ケ5鬯ゥ蛹�スス�カ鬯ッ�ス�ャ�ャ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ソ�ス�ス�ス�ス�ス�ス�ス�ス)鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス38鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ蟷「�ス�「�ス�ス�ス�ァ鬮ッ譎「�ス�イ�ス�ス�ス�ィ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス32鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�オ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス髫カ謐コ諷」�ス�ス�ス�ク�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�。鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス2鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬯ョ�エ陜捺コキ郢ュ�ス縺、ツ�ス�ス�ス�サ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬯ョ�エ陜捺コキ郢ュ�ス縺、ツ�ス�ス�ス�サ鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス30鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ェ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ェ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬮ッ�キ闔ィ螟イ�ス�ス�ス�ア�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ク�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス73鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス(鬯ョ�ョ陷ソ�・�ス�・�ス�ス�ス�ス�ス�ソ�ス�ス�ス�ス鬮ッ譎「�ス�キ�ス�ス�ス�サ鬯ッ�ョ�ス�」髫ー�ウ�ス�セ�ス�ス�ス�ス�ス�ス�ス�ヲ鬯ッ�ョ�ス�」鬯イ�ス�シ螟イ�ス�ス�ス�ス�ス�ス�ス�カ鬯ョ�」陋ケ�ス�ス�ス�ス�オ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�カ鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス)鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス70鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ�ス�ス�ス�ス髫ー�ォ�ス�セ�ス�ス�ス�ソ�ス�ス�ス�ス(鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ッ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬮ッ蛹コ�サ繧托スス�ス�ス�・�ス�ス�ス�ス驕カ謫セ�ス�ォ�ス�ス�ス�ク�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ヲ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ョ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬮ッ�キ�ス�キ�ス�ス�ス�カ鬩包スカ隰ォ�セ�ス�ス�ス�ェ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�サ) TW鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス52鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�オ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス鬮ォ�ィ�ス�ス�ス�ソ�ス�ス鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス髫カ謐コ諷」�ス�ス�ス�ケ�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス(鬯ョ�」陋ケ�ス�ス�ス�ス�ウ�ス�ス�ス�ス�ス�ス�ス�サ鬯ョ�ッ隶厄スク�ス�ス�ス�ウ�ス�ス�ス�ス�ス�ス�ス�ー) TW鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス97鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つknob鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス2鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ッ�ョ�ス�ォ�ス�ス�ス�ー�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス80鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ョ�ッ陷茨スキ�ス�ス�ス�ケ�ス�ス�ス�ス�ス�ス�ス�ソ鬯ョ�ッ�ス�キ�ス�ス�ス�キ鬮ォ�ー�ス�ウ�ス�ス�ス�セ�ス�ス�ス�ス�ス�ス�ス�シ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス28鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ッ�ィ�ス�セ髯キ闌ィ�ス�キ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス53鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�オ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス鬮ォ�ィ�ス�ス�ス�ソ�ス�ス鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス髫カ謐コ諷」�ス�ス�ス�ケ�ス�ス�ス�ァ鬯ョ�ヲ�ス�ョ髯キ�サ�ス�サ�ス�ス�ス�シ�ス�ス�ス�ス�ス�ス�ス�ケ�ス�ス�ス�ァ鬯ョ�ヲ�ス�ョ髯キ�サ�ス�サ�ス�ス�ス�ソ�ス�ス�ス�ス鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬩包スカ闕ウ讖ク�ス�、�ス�イ�ス�ス�ス�ス�ス�ス�ス�ス(鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス髴托ス「隴会スヲ�ス�ス�ス�ケ�ス�ス�ス�ァ鬯ゥ諤憺●�ス�ス�ス�ォ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ス�ケ髫エ雜」�ス�「�ス�ス�ス�ス�ス�ス�ス�ゥ鬯ゥ蟷「�ス�「髫エ雜」�ス�「�ス�ス�ス�ス�ス�ス�ス�ェ鬯ゥ蟷「�ス�「髫エ雜」�ス�「�ス�ス�ス�ス�ス�ス�ス�シ)鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス102鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ�ス�ス�ス�ス髫ー�ォ�ス�セ�ス�ス�ス�ソ�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス105鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ョ�ッ�ス�キ�ス�ス�ス�キ鬮ォ�カ隴幢スア陞ウ�ヲ鬮「�ケ陞溷頃�セ�ィ�ス�ス�ス�サ鬯ゥ蠅灘セ暦ソス�ス�ス�ゥ鬮ォ�エ陝キ�「�ス�ス�ス�ェ鬯ッ�ョ�ス�ォ髯句ケ「�ソ�ス�ス�ス�ス�ス�ス�ス�ス�ソ鬯ョ�」髮具スサ�ス�ソ�ス�ス�ス�ス�ス�ス�ス�ス�ス�コ TW鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス25鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つF鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス52鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ィ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬮」蛹�スス�ウ髯槭q�ソ�ス�ス�ス�ス�ス驕カ謫セ�ス�ォ�ス�ス�ス�ク�ス�ス�ス�コ�ス�ス�ス�ス�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス82鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ鬯ゥ謳セ�ス�オ�ス�ス�ス�コ鬮ッ�キ�ス�キ�ス�ス�ス�カ鬩包スッ�ス�カ�ス�ス�ス�ウ鬯ゥ蟷「�ス�「�ス�ス�ス�ァ�ス�ス�ス�ス�ス�ス�ス�ス鬩包スッ�ス�カ�ス�ス�ス�ウ鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス78鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ10鬯ョ�ッ隴趣ス「�ス�ス�ス�キ�ス�ス�ス�ス�ス�ス�ス�エ鬯ッ�ッ�ス�ゥ髯具スケ�ス�ス�ス�ス�ス�ス�ス�ス�ス�ク鬯ョ�ォ�ス�ー�ス�ス�ス�ス�ス�ス�ス�ソ�ス�ス�ス�ス鬯ョ�ォ�ス�ィ髯句ケ「�ソ�ス�ス�ス�ス�ソ�ス�ス�ス�ス48鬯ゥ謳セ�ス�オ�ス�ス�ス�イ�ス�ス邵コ�、�つ |


