
2013.06.14
出来た♪とりあえずデジタル出力に成功。これ面白いわ〜。あとデジタル入力とアナログ入力・出力のやり方を覚えてセンサーチップからの情報の引き出し方を覚えれば簡単に自律ロボットもどき作って遊べそう。もちろん使い慣れているPerlで組むよw
コネクタマップを見て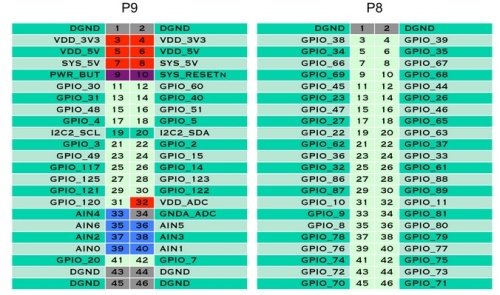
たとえばGPIO port 60(左のコネクタの右側上から6番目)に通電するためには、まず
- echo 60 > /sys/class/gpio/export
active_low direction edge power subsystem uevent value
というファイルがある。
まず、GPIO60を出力で使う事を宣言するために
- echo out > direction
- echo 1 >value
消すには
- echo 0 >value
- cat value
↓のサイトではまずコネクタの使い方としてMODE7を選んでいるが、現在所持しているBeagleboneには/sys/kernel/debug/omap_mux/gpmc_ad6なんてディレクトリは無かった。写真を見ると昔のBeagleboneなので仕様変更があったのかも。
- beaglebone で、コマンドラインからデジタルとアナログ入出力 - お前の血は何色だ!! 4 23 users 2いいね
テスターで測ると流れる電圧は3.3V。LEDに1.8V、抵抗に1.1Vぐらいだった。電子工作久しぶりすぎてLEDのプラスとマイナスも分からない。あぶねー。オームの法則とか計算方法とか思い出さなきゃ。最近は昔と違って便利な回路シミュレーターとかがある気がする。フリーで無いかな。
追記
後から調べたところによるとGPIO出力はMAX4〜6mAに抑える必要あり、もっと抵抗値をあげないとボードが壊れる。短時間なら大丈夫だろうけど。
試して無いけど使用が終わったポートは
echo 60 > /sys/class/gpio/unexport
とするそうだ。
参考:OpenCVで遊ぼう!: BeagleBone BlackでLEDを光らせる
Category:#電子工作 Raspberry Pi、Arduinoなど
■ ■ ■ コメント ■ ■ ■
いいっすね!
001 [06.14 04:22]。@InfoWeb:こういう記事見ると買いたくなるけど、センサーからの電圧変化で出力を変えて動作させるロジックとか難しそうだ…。 ↑
002 [06.14 04:44]mn@Dion:流れるのは電流で、電圧は印加するものです~_~; ↑
003 [06.14 09:20]フリーなら@YourNet:LTSpiceドソー ↑
004 [06.14 23:01]Aガット@OCN:100Ωだと10mA以上流れてるけど、ポートの駆動能力は大丈夫ですかね? ↑
005 [06.15 00:42]ふぇちゅいん(管理人) TW★47:>>004 ぎゃ、学習しました。テスターで測ったら8.9mA。調べるとoutputのmax currentは4mAだそうです。ダメっすね。 ↑
本カテゴリーで直近コメントが書かれた記事
→カテゴリー:#電子工作 Raspberry Pi、Arduinoなど(記事数:254)
本カテゴリーの最近の記事(コメント数)


