

2013.07.04
Beaglebone Blackをイーサネット経由で静的IP設定でネットワークにつなぎ、インターネットアクセスする
USB接続でパソコンにつなぐと給電と共に192.168.7.2でターミナル接続出来て便利だけど
- Beagleboneから母艦パソコン以外のネットワークに接続するのは面倒(母艦パソコンの設定が必要)
- せっかく本体にLAN端子があるので直接イーサネットケーブルで接続したい
(省略されています。全文を読む)
2013.06.30
BeagleBone Blackでアナログ入力(電圧の読みとり)に成功
(省略されています。全文を読む)
2013.06.15
Beaglebone:デジタル入力のやり方を覚える。各ポートの最大電流について
まず、前回の回路はヤバかったみたい。
GPIOをoutputで使う時の最大電流は4mA〜6mAとのこと。先日の実験で流れる電流を調べると8.9mAでした。ダメじゃん。壊すところだった(汗)。GPIOの出力を直接駆動力に使うなってことね。ここから1Aぐらい使えたら色々とお手軽工作出来るのにね。ちなみにArduinoも40mAぐらい以下にしないといけないらしい。
LEDの順方向電圧1.8Vとして4mAに抑えるためには直列につなぐ抗体値をRとして残り1.5Vなので
1.5V=4mAxR
R=375Ωって感じか。
うんオームの法則思い出してきた。
ボードから取り出せる駆動力として使えそうな電力としては
- VDD3.3Vが250mA MAX
- VDD5Vが1000mA MAX(ただしUSB給電している時は使用不可)
- SYS5Vが250mA MAX
参考:
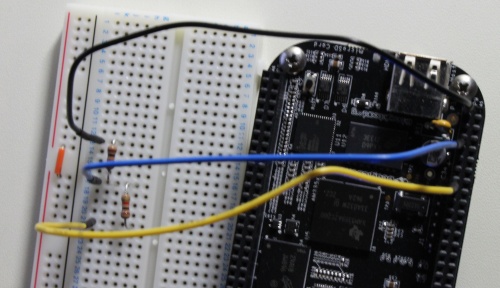
★デジタル入力編
先日のLEDを点灯させたやつを一部変えて
- echo 60 > /sys/class/gpio/export
- echo in > /sys/class/gpio/gpio60/direction
GNDとGPIO60をショートさせると
cat valueで表示される値が1→0となる。(感覚的に0と1が逆だな)
この時テスターで測ると0.08mA流れていた。100Ω抵抗挟んでショートさせると0.00mAでvalueは1のままだった。
2013.06.14
BeagleBone:コマンドラインから外部LEDの制御に成功
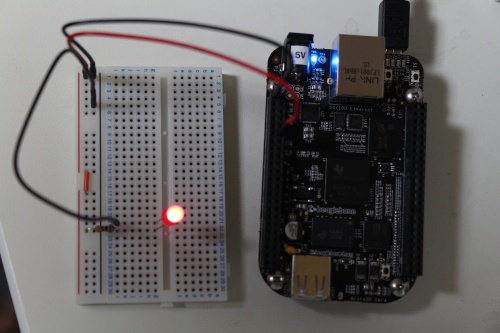
出来た♪とりあえずデジタル出力に成功。これ面白いわ〜。あとデジタル入力とアナログ入力・出力のやり方を覚えてセンサーチップからの情報の引き出し方を覚えれば簡単に自律ロボットもどき作って遊べそう。もちろん使い慣れているPerlで組むよw
(省略されています。全文を読む)
2013.06.12
生まれて初めてブレッドボードを購入。Beagleboneを引き続きいじる。

(省略されています。全文を読む)
2013.06.09
Beaglebone(ビーグルボーン)をいじってみた
先日、購入したBeagleboneをいじってみました。
とりあえずUSBでパソコンに刺してブラウザでアクセス&Tetatermでアクセス、コマンドラインでボード上のLEDを点灯させるのに成功した。
こりゃ楽しいボードかもしれない。あこがれのフィジカルコンピューティングがお手軽に出来そうな予感がある。
★Step1:
机にボードを平置きするのはちょっと嫌だったので、100円ショップで買ってきたM3×15mmってサイズのねじで足をつけた。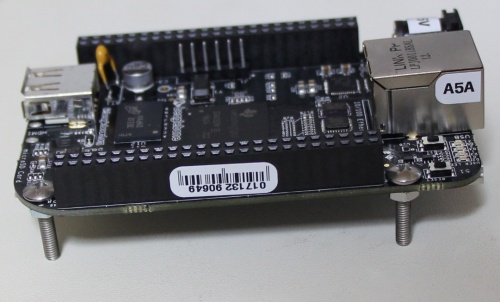
(省略されています。全文を読む)
[1・2・3・4・5・6・]